プロジェクト
3次元環境認識を用いたロボットの高機能化
ロボットの代表的な作業として物体をある場所から別の場所へ移動させるピック&プレース作業がある。これまでロボットは主に生産現場にて発展を遂げてきたが、今後は家庭内にロボットが進出することが考えられる。しかしながら、家庭内においては作業の対象となる様々な物体が不特定な場所に雑多に置かれている場合が多く、作業を実現するにはロボットの周囲の環境および作業対象の認識をすることが必要となる。人間はそれまでの経験により素早く周囲の環境の認識を可能としているが、ロボットにはそれが難しい。このため、ロボットの周囲の環境の3次元情報を取得し、作業対象の認識およびロボットの動作計画を行い、様々な環境における作業を実現している。

パワーアシスト機器の開発
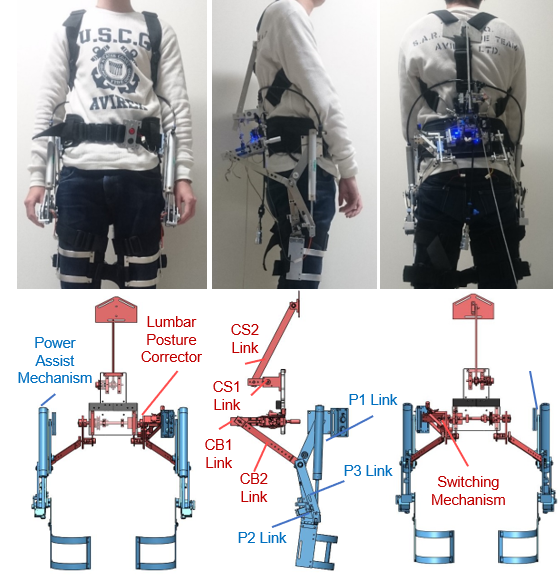
重量物を扱う作業は作業者への負担が大きく、中でも腰痛は国民病と言っても良いぐらいに多くの人々の問題となっている。腰椎を含めた脊柱は多くの骨が繋がった構造をしており、作業姿勢によってはその一部に負荷が集中することで腰痛を起こしてしまう。背中の筋肉で上体を支えるのではなく、ハムストリングスおよび臀部の筋肉で上体を支えることでかなりの重量を扱うことが可能ではあるが、意識的にその作業姿勢をとる必要があるため慣れが必要となる。このことから、腰に負担のかからない作業姿勢に誘導する機構を加えた腰部パワーアシスト機器の開発を行っている。