ドライビングシミュレータの自動生成
本研究の目的はAIによるシミュレータの自動生成システムの開発です。本研究ではAI技術の一種の敵対的生成ネットワーク(GAN)にドライブレコーダの動画を学習させ、シミュレータを自動生成します。 本研究のシミュレータ自動生成技術を高齢ドライバーの運転免許時のスクリーニング検査に活用することで、効率的な検査の実現とコスト削減が期待できます。自動車学校や自宅で利活用することで高齢ドライバーの生活圏における安全運転指導や危険予測訓練ができます。
研究成果
[1]Imai, Y., Senda, T., & Kajiwara, Y. (2025). Improving Image Quality and Controllability in Speed+ Angular Velocity to Image Generation Through Synthetic Data for Driving Simulator Generation. IEEE Access.[2]今井優人,梶原祐輔*, (2024.9.5) ,SMOTEを用いたドライビングシミュレータ生成AI, 第23回情報科学技術フォーラム(FIT2024),pp475-476.
[3]山本成騎, 今井優人,梶原祐輔*, (2023.9.7) ,生成モデルによるドライビングシミュレータでの交通ルールの自動評価, 第22回情報科学技術フォーラム(FIT2023),pp269-270.
[4]今井優人,山本成騎, 梶原祐輔*, (2023.9.7) ,敵対的生成ネットワークとオーバーサンプリングによるステアリング操作にロバストなドライビングシミュレータの生成, 第22回情報科学技術フォーラム(FIT2023),pp.271-272.
[5]山本成騎, 梶原祐輔*, (2022.9.14) ,物体検出を用いた自動生成されたドライビングシミュレータのルールベース評価, 第21回情報科学技術フォーラム(FIT2022).
[6]吉川晃太, 梶原祐輔*, (2022.9.13), 敵対的生成ネットワークによるドライビングシミュレータ生成時の評価指標に関する一考察, 第21回情報科学技術フォーラム(FIT2022).
研究助成
[1]梶原祐輔, 高齢ドライバーの運転技能評価のための動画再生型シミュレータ自動生成システムの開発, 科学研究費助成事業(基盤B), 研究代表者, 18,720千円, 2023月4月-2027年3月.[2]梶原祐輔, 人工知能が自動生成したシミュレータによる 危険予測訓練, 公益財団法人中部科学技術センター:第33回人工知能助成, 研究代表者, 500千円, 2022月12月-2023年11月.
[3]梶原祐輔, 高齢ドライバーのDynamic steering skillsを評価するためのシミュレータの開発, 公益財団法人電気通信普及財団, 研究代表者, 2,178千円, 2022年4月-2023年3月.
一番上に戻る
高齢ドライバーの運転技能の定量化
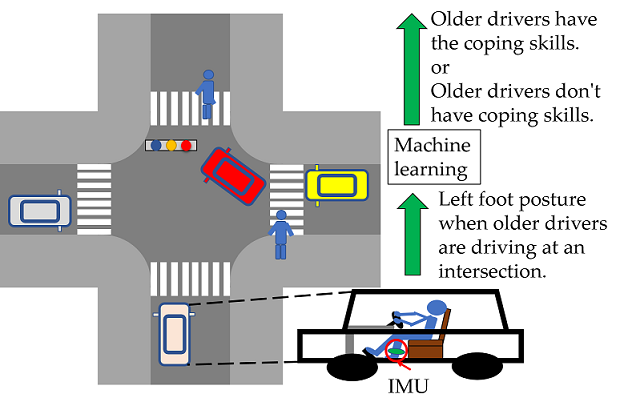
高齢ドライバーによる死亡事故が社会問題になっています。本研究の目的は運転動作から、高齢ドライバーの認知機能および運動機能および運転スキルを定量評価することです。この目的を達成するために、我々は交差点付近の確認動作および運転操作に着目し、研究を進めています。
研究成果
[1]Kajiwara, Y.*, Murata, E. (2022). Effect of Behavioral Precaution on Braking Operation of Elderly Drivers under Cognitive Workloads. Sensors, 22(7), 5741.[2]Kajiwara, Y.*, Kimura, H. (2021). Predicting the coping skills of older drivers in the face of unexpected situation. Sensors, 21(6), 2099.
特許
[1] 梶原祐輔, (2022.4.1), 運転者適性評価システム(特願2020-202473、特許7051146).研究助成
[1]梶原祐輔, 研究代表者, 実車運転時の高齢ドライバーの動的な環境変化への対応力の予測, 公益財団法人 三谷研究開発支援財団 研究助成, 1,000千円, 2021年6月 - 2022年5月[2]梶原祐輔, 研究代表者, 自動車免許返納判断支援を目的とした焦り時の高齢者の運動制御能力予測, 科学研究費助成事業(若手), 4,030千円, 2020年4月 - 2023年3月.
[3]梶原祐輔, 研究代表者, 自動車免許自主返納支援のための高齢ドライバーの耐心性運動制御能力の可視化, 戦略的情報通信研究開発推進事業, 3,302千円, 2020年4月 - 2021年3月.
報道
[1] 高齢者の運転能力数値化、北陸新聞、2020年10月27日、梶原祐輔.[2] 高齢者の運転能力可視化、北陸中日新聞、2020年10月30日、梶原祐輔.
[3] 高齢者の対応力測定、読売新聞、2020年10月30日、梶原祐輔.
[4] 運転免許の自主返納 高齢ドライバーの技能を見える化、北陸放送、2020年11月6日、梶原祐輔.
一番上に戻る
小学4年生以上を対象としたAI教育ツールの開発(受託研究)
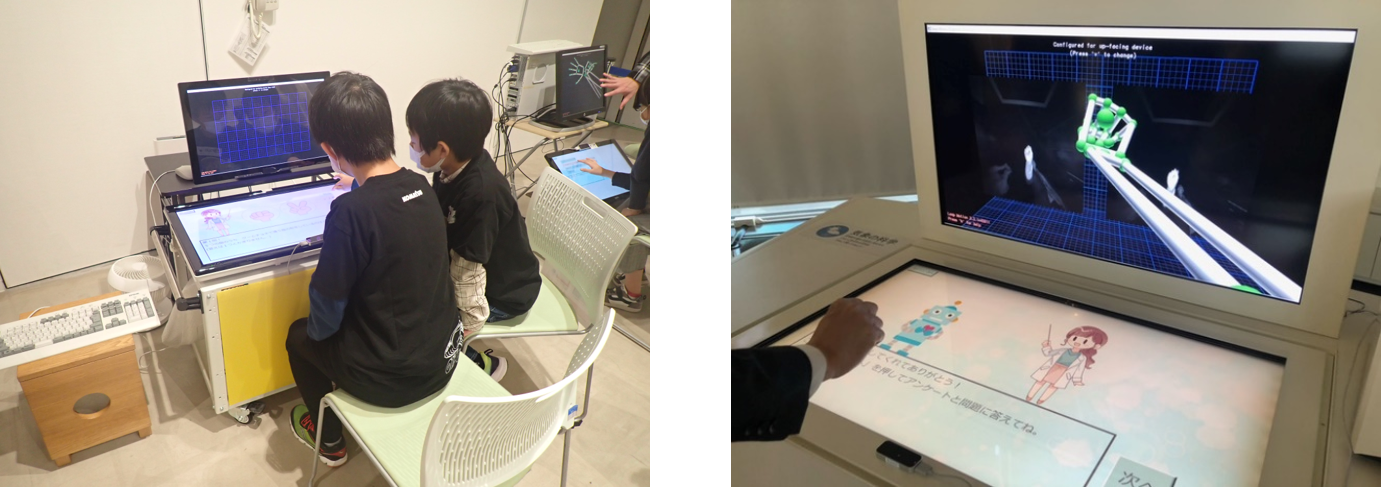
本研究ではじゃんけん判定AIの作成を通じて、AIに対する理解を深める教育ツールを開発した。このシステムは2021年12月15日のサイエンスヒルズこまつ主催のサイエンスフェスタに出展しました。
研究成果
[1]Deguchi,D., Senda, T., Kajiwara, Y., (2025, December). A Field Study of Prompt Programming with LLM. The 11th International Conference on Intelligent Informatics and BioMedical Sciences (ICIIBMS2026).[2]出口 大地, 仙田 朋也, 梶原 祐輔,(2025.9.4), 大規模言語モデルを用いた非専門家向けプログラミング支援ツールの開発と実践, 第24回情報科学技術フォーラム, pp.521-522.
[3]Kajiwara, Y., & Kawabata, K. (2024). AI Literacy for Ethical use of Chatbot: Will Students accept AI Ethics?. Computers and Education: Artificial Intelligence, 100251.
[4]梶原祐輔,(2023.9.8), 中学生以上を対象とした文章生成AIに関する教育とその効果, 第22回情報科学技術フォーラム, pp.499-500.
[5]Kajiwara, Y., Matsuoka, A., & Shinbo, F. (2023). Machine learning role playing game: Instructional design of AI education for age-appropriate in K-12 and beyond. Computers and Education: Artificial Intelligence, 100162.
研究助成
[1]梶原祐輔, 研究代表者, ChatGPTの倫理的な使用のための調査研究, 公益財団法人 カシオ科学振興財団 研究助成, 3,000千円, 2025年1月 - 2025年12月[2]梶原祐輔, 研究代表者, ChatGPTの倫理的な使用のためのAIリテラシー教育ツールの開発, 公益財団法人 村田学術振興・教育財団 研究助成, 2,000千円, 2024年7月 - 2025年6月
一番上に戻る
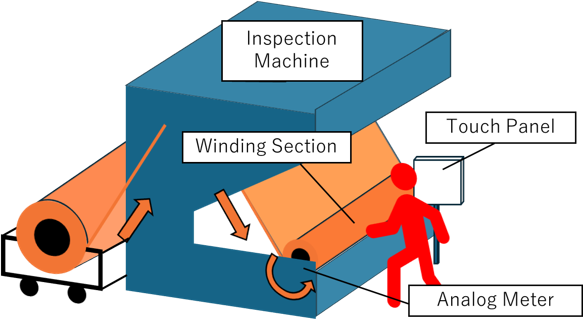
産業センシング・生産工程AI
現場データから検査時間を予測し、検査工程の最適化を支援します。
研究成果
[1]Nakamura, Y., & Kajiwara, Y. (2026). Prediction of Inspection Speed in Fabric Inspection Processes. Sensors and Materials, 38(6), 3225-3234.一番上に戻る
XR関連の研究
複合現実感(Mixed Reality; MR)は主に医療・航空・自動車産業などの分野で盛んに産業応用が進められています。 本研究では、MR空間においての操作領域を実物体に重畳表示することで、眼精疲労の軽減と操作性の向上を図ります。
研究成果
[1]Masuta, A., & Kajiwara, Y. (2026). Verification of Operability in Object-based Interfaces. Sensors and Materials, 38(6), 3235-3254.[2]新保 翔汰, 梶原祐輔*,(2023.9.4), Extended Realityにおけるキーボード操作に最適な操作領域,第23回情報科学技術フォーラム(FIT2024),pp.331-332.
[3]桐山 由衣, 梶原祐輔*,(2023.9.6), 複合現実感における操作領域と身体的疲労感の関係,第22回情報科学技術フォーラム(FIT2023),pp.127-128.
[4]稲葉 健斗, 梶原祐輔*,(2022.9.7), 仮想空間における音が身体所有感に与える影響の調査,第22回情報科学技術フォーラム(FIT2023),pp.265-266.
[5]桐山 由衣, 梶原祐輔*,(2022.9.13), Mixed Realityにおける実物体に重畳表示した仮想ディスプレイの操作性の調査,第21回情報科学技術フォーラム(FIT2022).
一番上に戻る
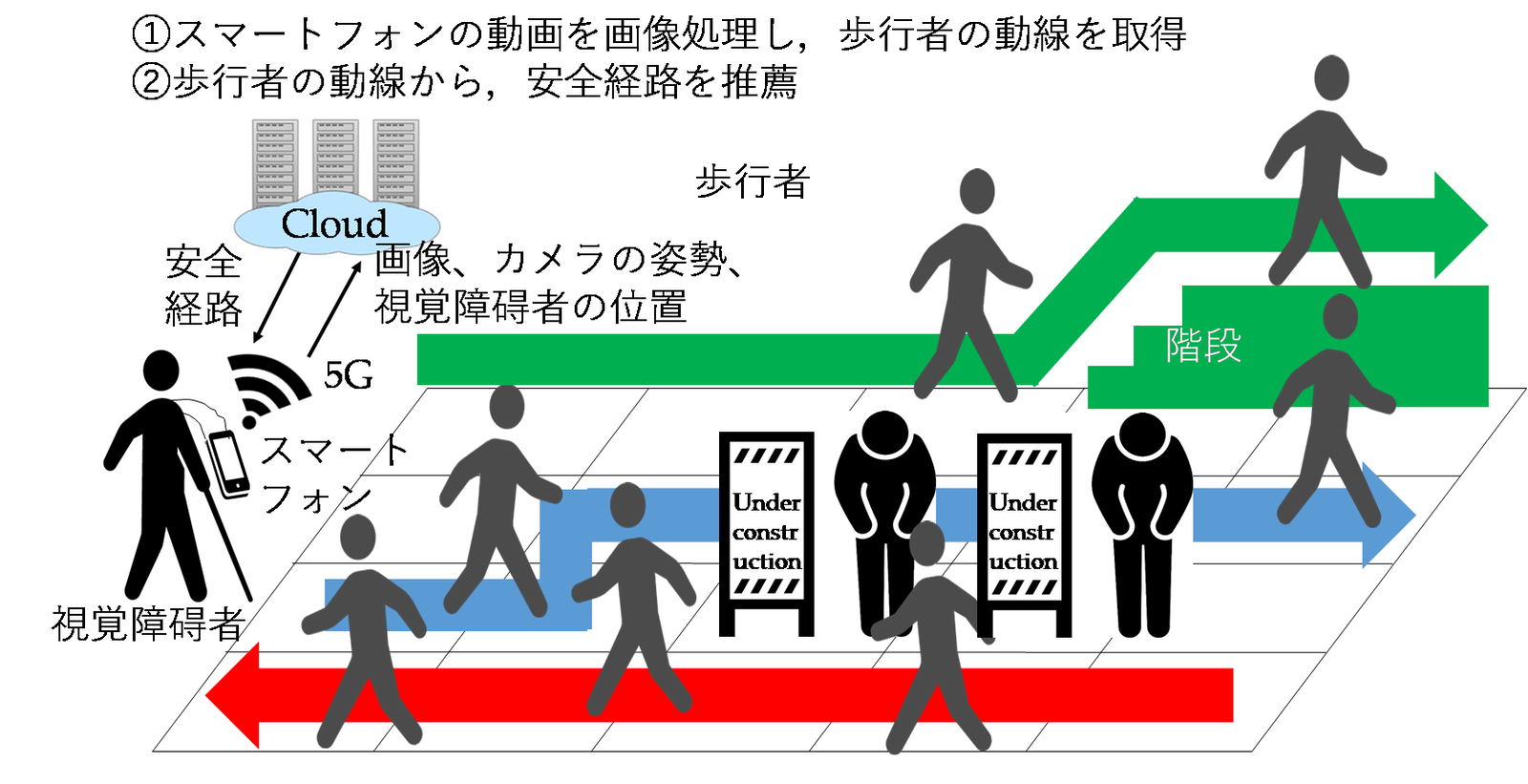
視覚障碍者を安全な通路へ誘導するシステム
世界保健機関(WHO)によると,現在,弱視,または全盲の視覚障碍者が世界で約2億5300万人いる.位置測位と障害物検出を組み合わせたナビゲーションシステムは、盛んに研究開発されています。屋外の位置測位はGPS,障害物検出は画像処理で為されることが多い.しかしながら、これらの障害物検出方法を人通りの多い場所で使用した場合,前方の歩行者で障害物が見えなくなる問題(オクルージョン問題)が発生し,精度が著しく低下する.また視覚障碍者は人通りの多い場所を歩くことに対して不安を感じており,この問題の解決が急務である.
この問題を解決するために,スマートフォンのカメラで撮影した前方歩行者の歩容を機械学習し,人流を利用した人通りの多い場所における視覚障碍者の誘導システム“Follow
me!”を開発した。人通りがある場合,視覚障害者の前方を歩行する晴眼者を即興の案内人に見立て,障害物を回避できる安全な経路に視覚障害者を誘導することができる.一方,人がいない場合でも,前方の凹凸を検知する研究成果により,障害物を検知して回避する経路を算出する.さらに本手法は計算コストが単なる障害物検知に比べ抑えられる.一般に障害物を検知した後,別途安全な経路を計算すると,安全な経路を導き出すまでに時間がかかる.申請者らが行った前方の凹凸を検知する研究においても,計算コストが問題となっていた.本研究の手法は,障害物の回避と安全な経路の選択を同時に計算できるため,計算コストを抑えられる.
研究成果
[1]Kajiwara, Y.*, Kimura, H. (2019). Object identification and safe route recommendation based on human flow for the visually impaired. Sensors, 19(24), 5343.一番上に戻る